


R&D AHRS CAN Sensor
This CAN based IMU with an inbuilt Attitude Heading Reference System (AHRS) outputs:
- 3 axes of acceleration,
- 3 axes of rotation,
- 3 axes of magnetic field flux,
- Quaternion angles,
- Euler angles (pitch, roll and yaw/bearing).
The difference between an IMU and an AHRS sensor is that the AHRS uses a magnetometer and thus the yaw/bearing is relative to magnetic north.
The configurable CAN interface allows the unit to attach to any vehicle with a CAN bus.
For example, this sensor can be used to analyse vehicle motion allowing users to gain a greater understanding of vehicle dynamics. Vibration analysis is another application example.
An example of how the yaw data can be used is shown in one of our latest projects: Determination of Rally Car Side Slip.
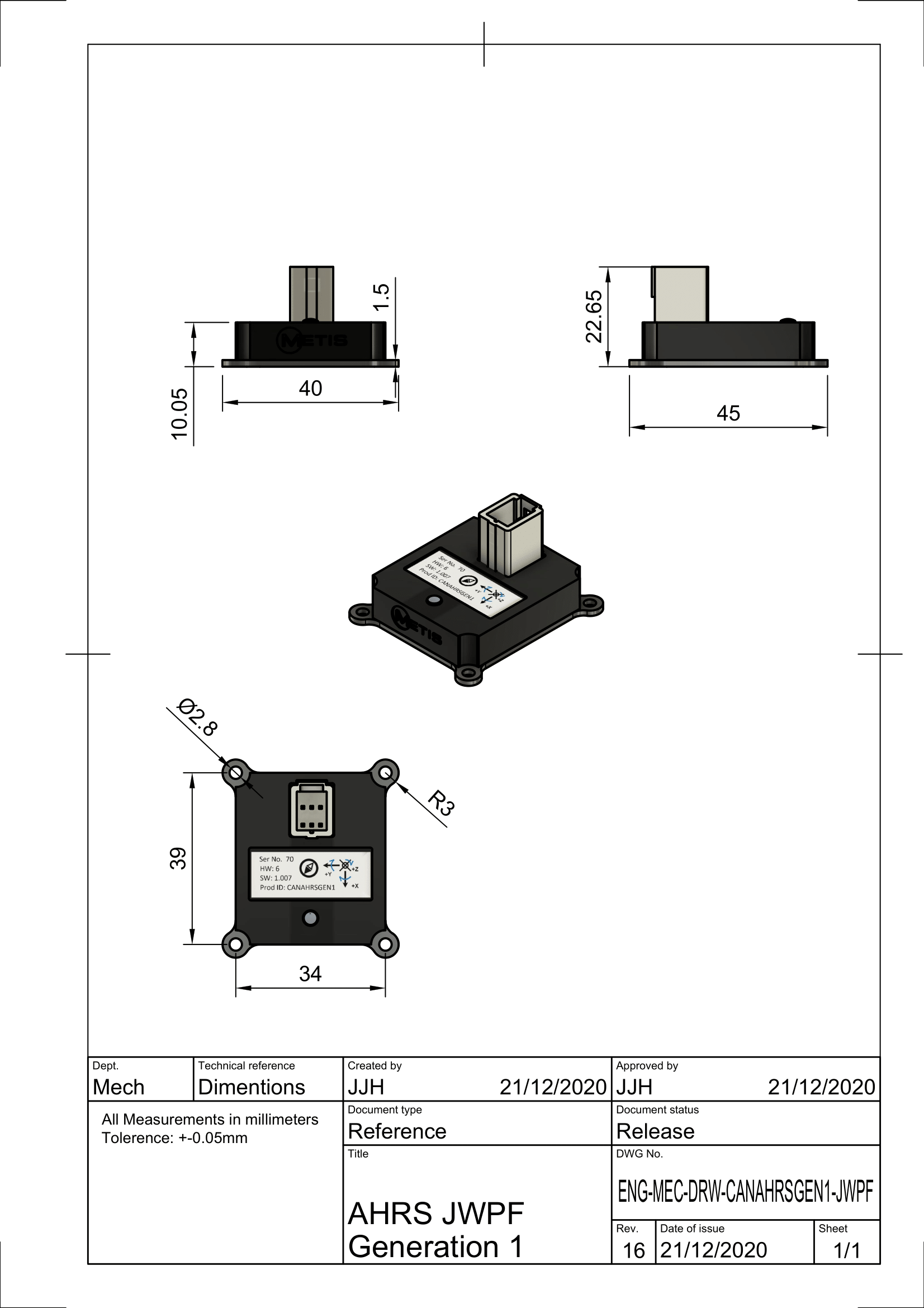
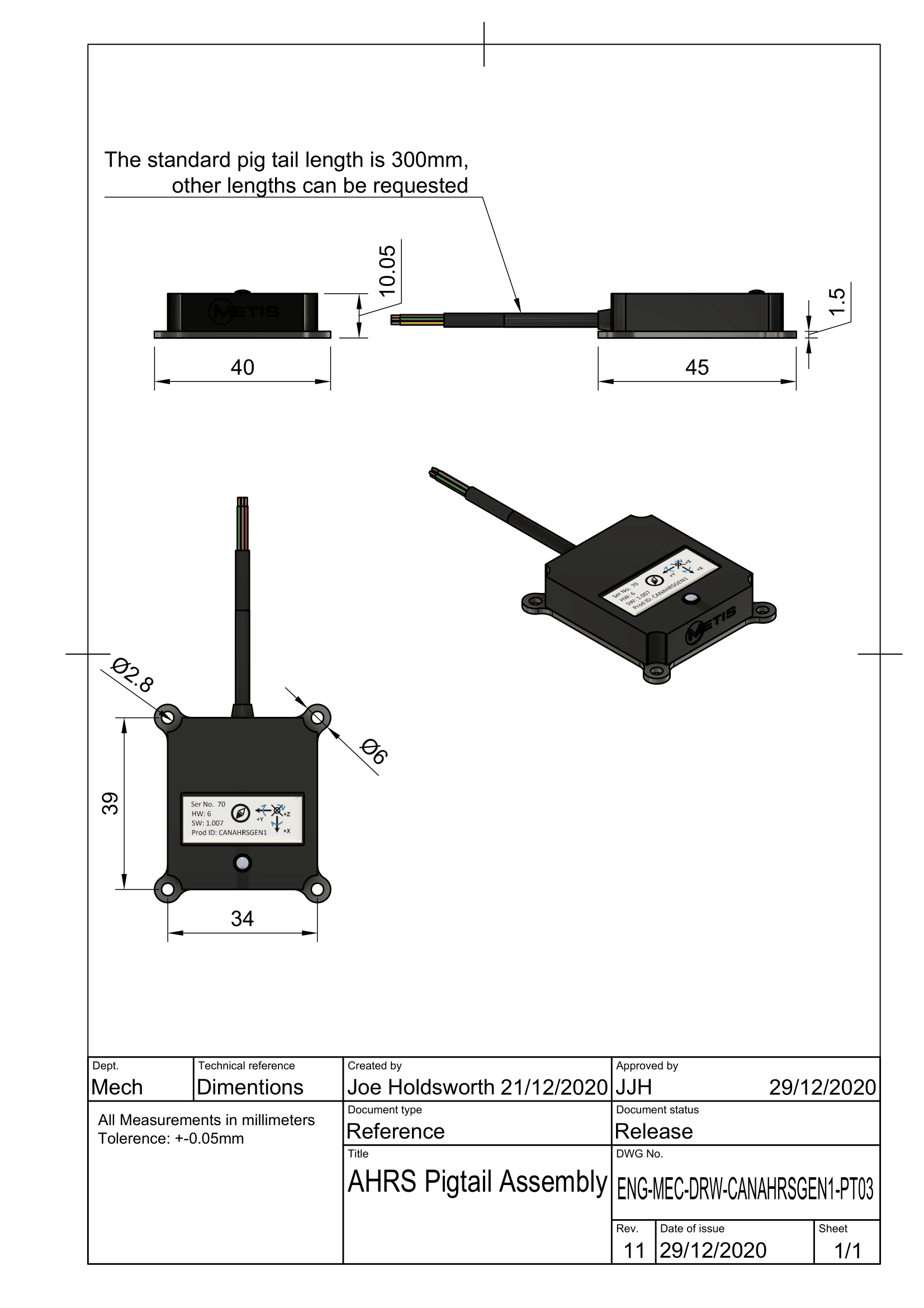
The 6 pin IP67 connector, wide ranging input voltage and the small size and mass of the unit allows easy interface into most vehicles.
Downloads:
- Spec Sheet
- User Manual
- CAD Model
- CAN dbc (Right click link and Save As)
Comes With:
- 1 x R&D AHRS CAN Sensor
- 1 x Sensor connector with crimps
Whilst in operation it is not unusual for the Euler rotation output accuracy to drop below high due to excessive vibration and/or magnetic perturbations. The unit might not always start up with the rotation accuracy high.
Even when the accuracy is not high, pitch and roll should still be reliable as well as change in yaw, it is the yaw accuracy relative to magnetic north that is mainly affected by this and that is why the estimated error in yaw accuracy is output as a parameter in one of the CAN bus messages.
Accelerometer and Gyro outputs are good over the operating range of the sensor.