

R&D IMU CAN Sensor
This CAN based Inertial Measurement Unit outputs:
- 3 axes of acceleration,
- 3 axes of rotation,
- Quaternion angles,
- Euler angles (pitch, roll and yaw).
As this unit does not use a Magnetometer, the yaw value will slowly drift as it has no reference to magnetic North. However, due to this fact, the IMU sensor performs better than the AHRS sensor in magnetically noisy environments.
The configurable CAN bus speed and address, along with the supplied DBC file allows easy integration into almost any vehicle with a CAN bus. This sensor can be used to analyse vehicle motion, vibration, shock loading and form part of a wider navigation system.
An example of how the yaw data can be used is shown in one of our latest projects: Determination of Rally Car Side Slip.
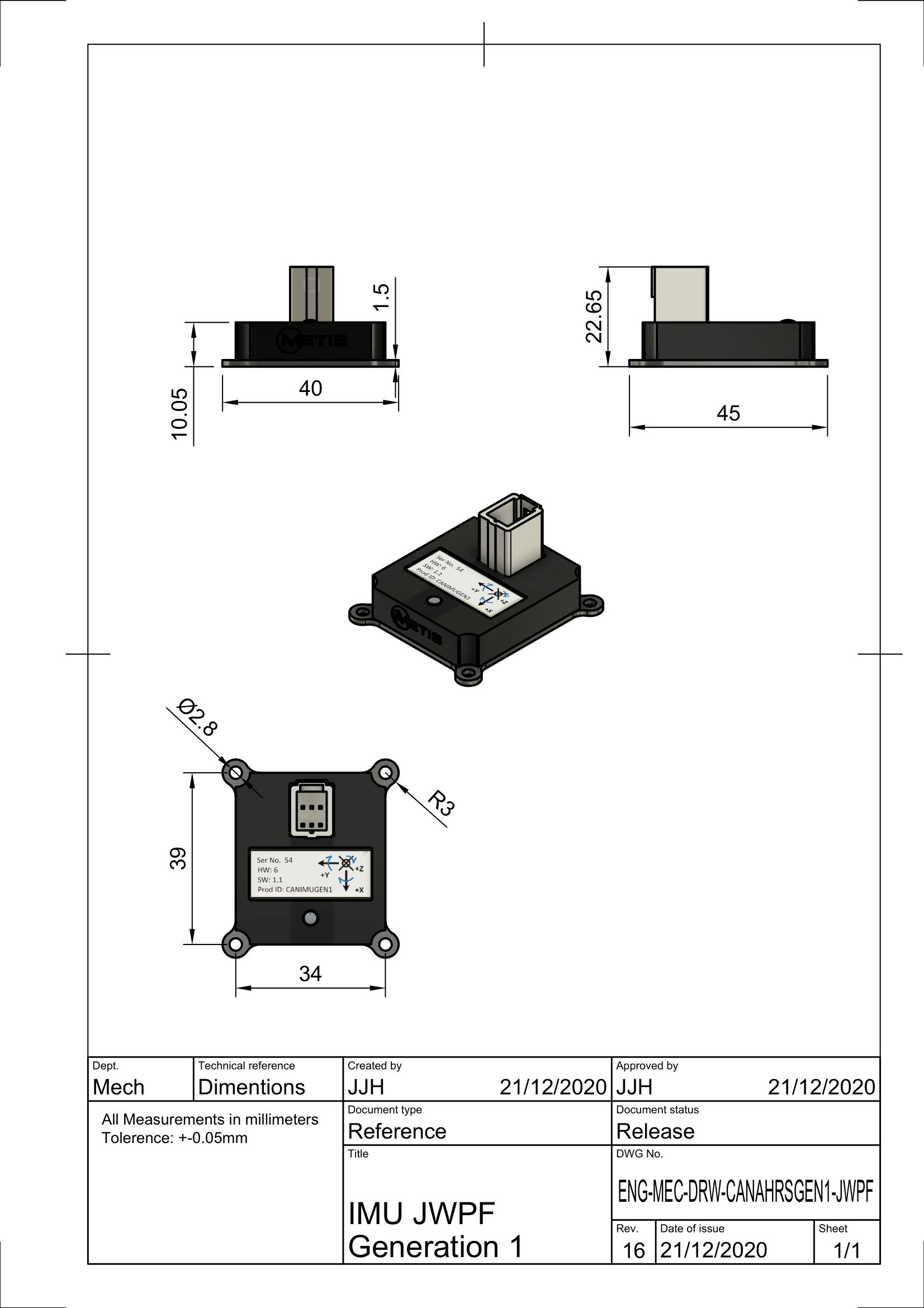
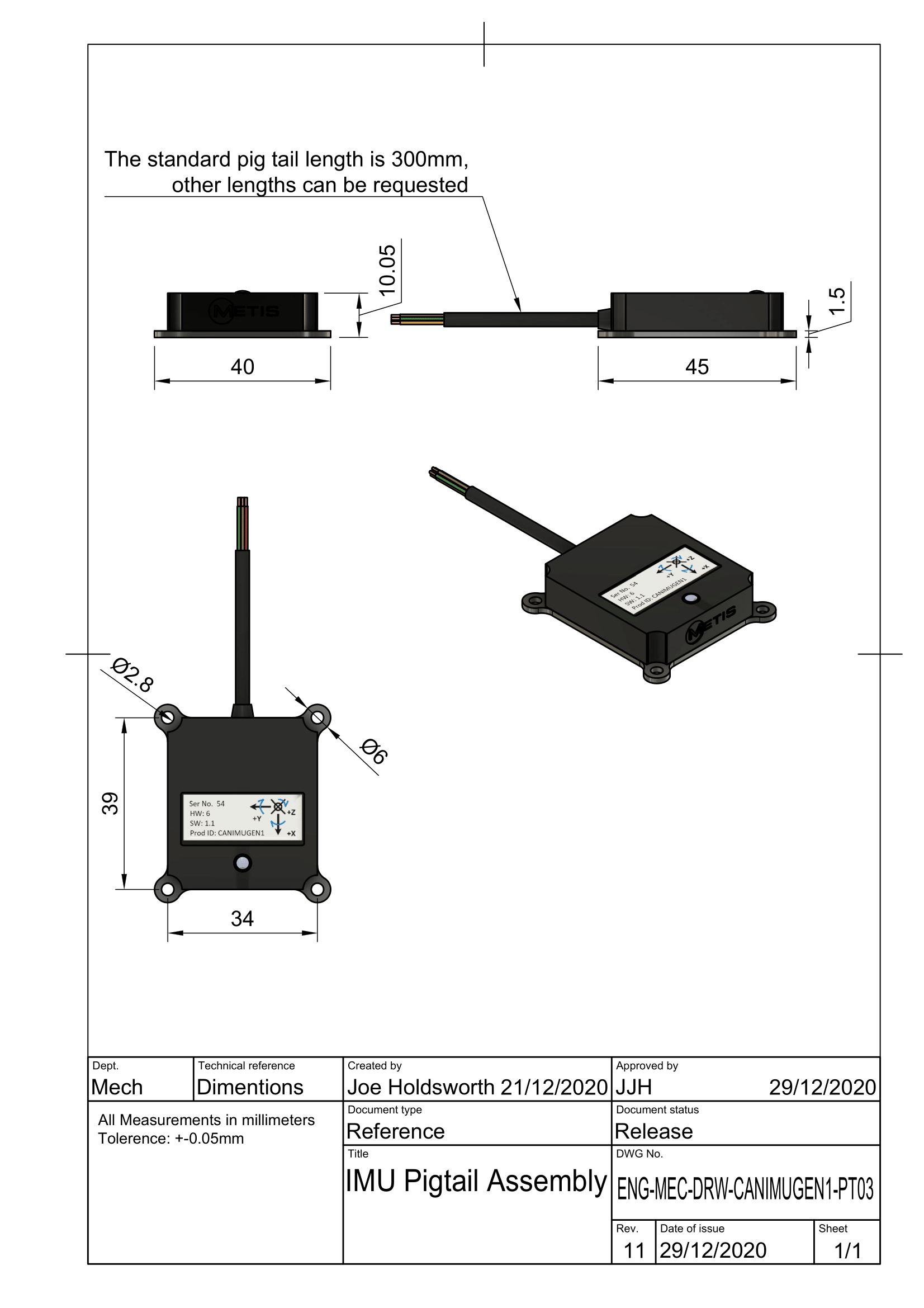
The choice of 6 pin IP67 connector or 300mm pig tail, wide ranging input voltage and the small size and mass of the unit allows easy interface into most vehicles.
Downloads:
- Spec Sheet
- User Manual
- CAD Model
- CAN dbc (Right Click Link and Save As)
Comes With:
- 1 x R&D IMU CAN Sensor
- 1 x Sensor connector with crimps
Whilst in operation it is not unusual for the Euler rotation output accuracy to drop below high due to excessive vibration.