



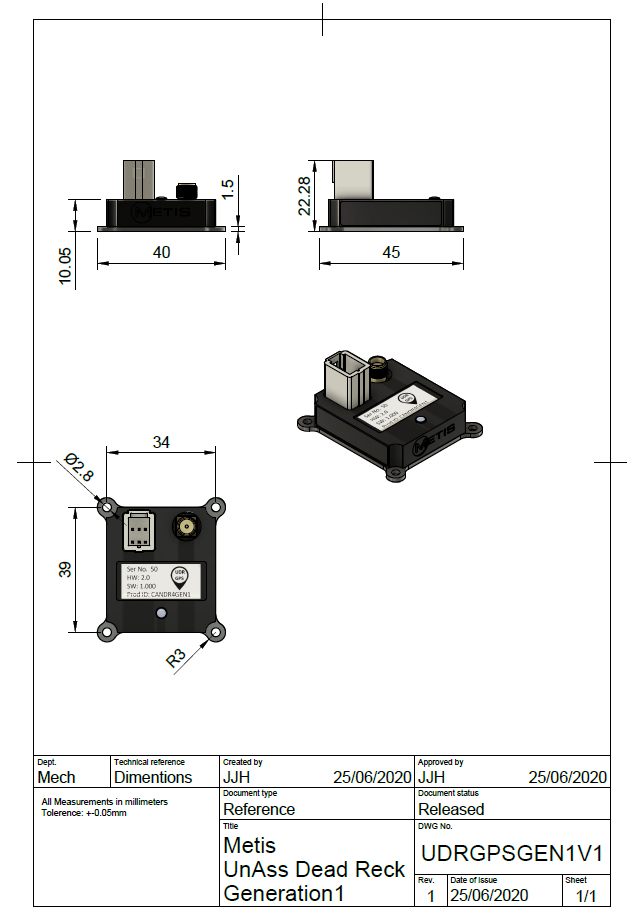
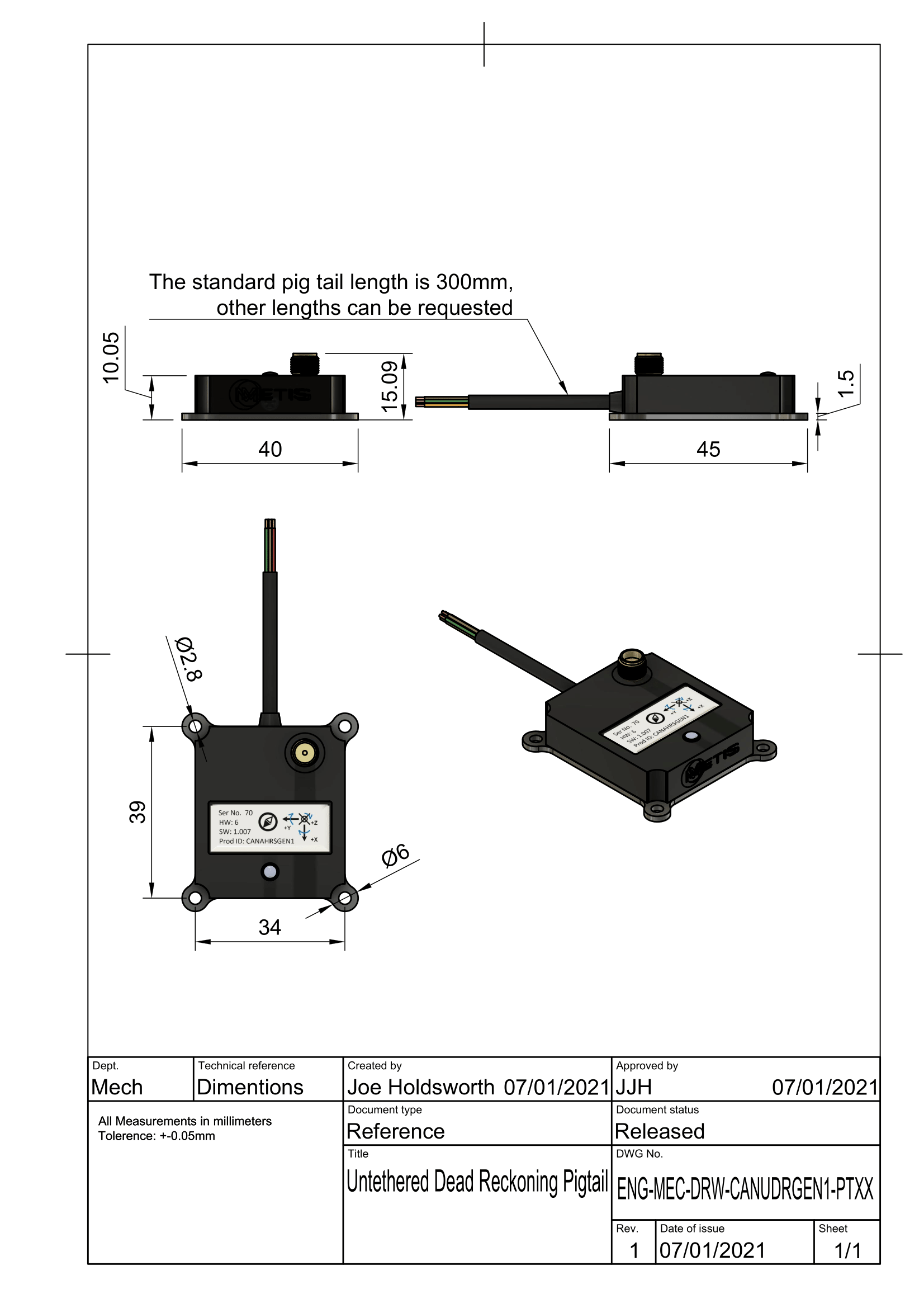
R&D UDR GPS CAN Sensor
This standalone CAN based GPS/GNSS Untethered Dead Reckoning (UDR) sensor outputs latitude, longitude, altitude, Course Over Ground and speed at up to 20Hz.
The strength of UDR is that even with complete GPS/GNSS signal loss, the unit can provide continuous positioning by using inbuilt inertial sensors to estimate its location, speed etc. it requires no external input to do this.
A video demonstration of the sensor's capabilities: Dead Reckoning - Continuous Positioning Despite GNSS Signal Loss can be found on our projects page alongside an example of how the data can be used: Determination of Rally Car Side Slip.
The configurable CAN interface allows the unit to attach to almost any CAN bus. It features either a 6 pin IP67 connector or a 300mm pig tail connector and a SMA for an external active or passive GPS/GNSS antenna. The wide ranging input voltage and the small size and mass of the unit allows easy interface into most vehicles.
Downloads:
- Spec Sheet
- User Manual
- CAD Model
- CAN dbc (Right click link and Save As)
Comes With:
1 x R&D UDR CAN Sensor
1 x Sensor connector with 10 x crimps
Note: Dead reckoning will only be accurate if the unit remains within the bounds of the inertial sensors.