|
Introduction: An experiment to show how the Metis Untethered Dead Reckoning (UDR) CAN Sensor can be used to provide continuous vehicle positioning in environments prone to GNSS/GPS signal loss and how this compares to the Metis 50 Hz GPS CAN Sensor. Setup: To run the experiment and obtain the data, we used the following equipment:
 Test Equipment Data Visualisation: To imitate the loss of GNSS/GPS signal caused by the obstruction of high rise buildings, tree cover or an underground network of tunnels, a car fitted with the two different types of Metis GPS Sensors, drove into an underground car park. The route was tracked by both sensors and the data overlaid onto Google Earth for comparison of their performance. 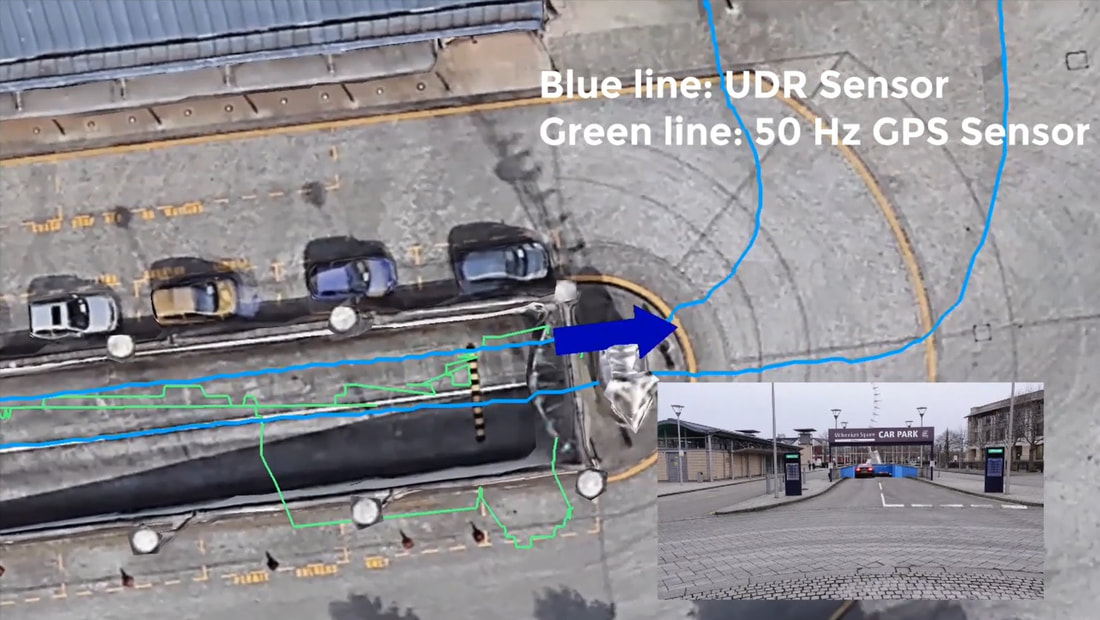 Position estimate from the UDR sensor and the standard 50Hz GPS sensor At the entrance to the underground car park, total loss of GNSS/GPS signal and positioning was observed from the 50 Hz Sensor. The GNSS/GPS signal loss would have affected the UDR Sensor at the same location, but it’s integral inertial sensors allowed for the vehicle positioning to continue. Background: UDR (Untethered Dead Reckoning) refers to GNSS data fused with inertial sensor data, enabling high positioning performance in places where GNSS signals are poor or not available. The Metis UDR CAN Sensor is available as JWPF or with pigtail. Comparison: The Metis UDR CAN Sensor clearly performs better at continuous vehicle positioning in environments prone to GNSS/GPS signal loss. However, the 50 Hz Sensor has not been rendered redundant. The Metis 50 Hz CAN Sensor performs best open outside areas where GNSS/GPS signal will not be lost and is beneficial if your vehicle has an element of side slip or irregular movement for the tracking of the most accurate position. Which sensor is best for your project will be dependent on these factors. Get in touch to discuss the options with one of our engineers. Next Steps: To create a situation in which the 50Hz CAN Sensor out performs the UDR CAN Sensor.
2 Comments
Stéphane Beauregard
5/5/2021 11:11:09 am
I gather you´re using a uBlox module in your sensor. Since you´re connected to the vehicle CAN bus, are you leveraging the vehicle speed and/or ABS tick signals?
Joe
5/15/2021 05:24:57 pm
Thanks for your question, this does not require wheel ticks which makes it extremely fast to integrate however drift is likely to be faster in GNSS signal loss situations. Leave a Reply. |


 RSS Feed
RSS Feed
|
|
For more information and pricing, please email
[email protected] |
© Metis Engineering Ltd, 2024
|